Theo Báo cáo An toàn Đường bộ Thế giới của WHO, gần hai người đã chết 135 triệu người chết vì tai nạn giao thông vào năm 2018 và 3.700 người chết vì tai nạn xe hơi mỗi ngày, nghĩa là khoảng 3.700 người chết vì tai nạn xe hơi mỗi ngày. Tuy nhiên, hầu hết những thương tích và tử vong này là do lỗi của con người. Là một trong những công nghệ tương lai quan trọng nhất của thế kỷ 21, chúng tôi tin rằng xe hơi tự lái sẽ loại bỏ hiệu quả các vụ tai nạn do lỗi của con người. LIDAR là phần quan trọng nhất và không thể thiếu trong nhận thức về môi trường của xe tự lái. Nó cho phép robot hoặc phương tiện đạt được khả năng nhận thức cao hơn con người và đảm bảo an toàn di chuyển trong tương lai. Hầu hết các giải pháp lái xe tự động hiện nay, do trường quan sát dọc (FOV) hạn chế và lắp bề mặt trong LiDAR, có các điểm mù xung quanh thân xe khó quét bởi LiDAR, và có thể dẫn đến một số lượng lớn các trạng thái và vật thể nguy hiểm không thể phát hiện được (như vật nuôi Trẻ em, v.v.). Hôm nay chúng tôi sẽ giới thiệu ba giải pháp LiDAR phổ biến để giải quyết phát hiện điểm mù tầm gần.
if (typeof jQuery == ‘không xác định’) {document.write (”); }}
Thông điệp và hội nghị của quỹ phòng hộ cho quý 1 năm 2020 và hơn thế nữa
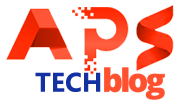
Gắn bề mặt LiDAR (màu đỏ làm nổi bật khu vực có thể phát hiện trong khi màu vàng biểu thị điểm mù không thể phát hiện)
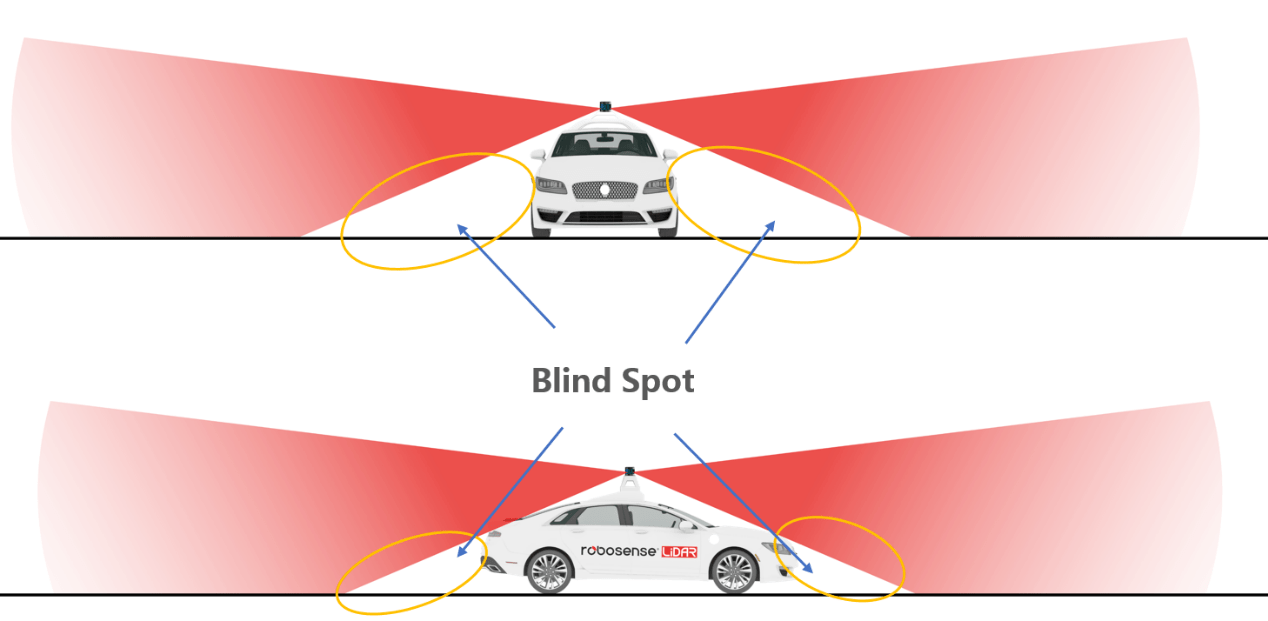
Kế hoạch A: Sáp nhập LiDAR chính và bổ sung

(Màu đỏ làm nổi bật khu vực có thể phát hiện của LiDAR chính và màu xanh lá cây biểu thị khu vực có thể phát hiện của LiDAR bổ sung)
Cài đặt LiDAR này hiện đang khá phổ biến: LiDAR chính được cài đặt ở trên cùng, với việc bổ sung các LiDAR được cài đặt gián tiếp (với ít tia laser hơn) ở cả hai bên của mái nhà để giúp che đi điểm mù.
Tuy nhiên, LiDAR bổ sung không được thiết kế đặc biệt để phát hiện các điểm mù. Trường nhìn dọc thường nằm trong khoảng từ 30 đến 40 độ, do đó vẫn có những vùng mù nhỏ bao quanh hai bên cơ thể.
Ngoài ra, chức năng hỗ trợ LiDAR trong việc phát hiện các khu vực mù dưới mặt trước và sau của xe rất hạn chế.
(Màu đỏ làm nổi bật khu vực có thể phát hiện của LiDAR chính, màu xanh lá cây biểu thị khu vực có thể phát hiện được của LiDAR bổ sung và màu vàng hiển thị khu vực điểm không thể phát hiện được)
Kế hoạch B: Thêm LiDAR “càng nhiều càng tốt”
Đơn giản chỉ cần thêm LiDAR là có một điểm mù. Bằng cách tăng số lượng LiDAR, điểm mù có thể giảm. Sơ đồ lắp đặt khác nhau với các mẫu xe khác nhau.
Tuy nhiên, do tầm nhìn dọc hạn chế của hầu hết các LiDAR (chỉ 30 ° ~ 40 °), để loại bỏ hoàn toàn điểm mù trong khu vực gần nhất của trường, cần một số lượng lớn LiDAR, gây ra chi phí rất cao và hiệu quả thấp. Ngoài ra, một số lượng lớn LiDAR được cài đặt trên xe gây đau mắt.
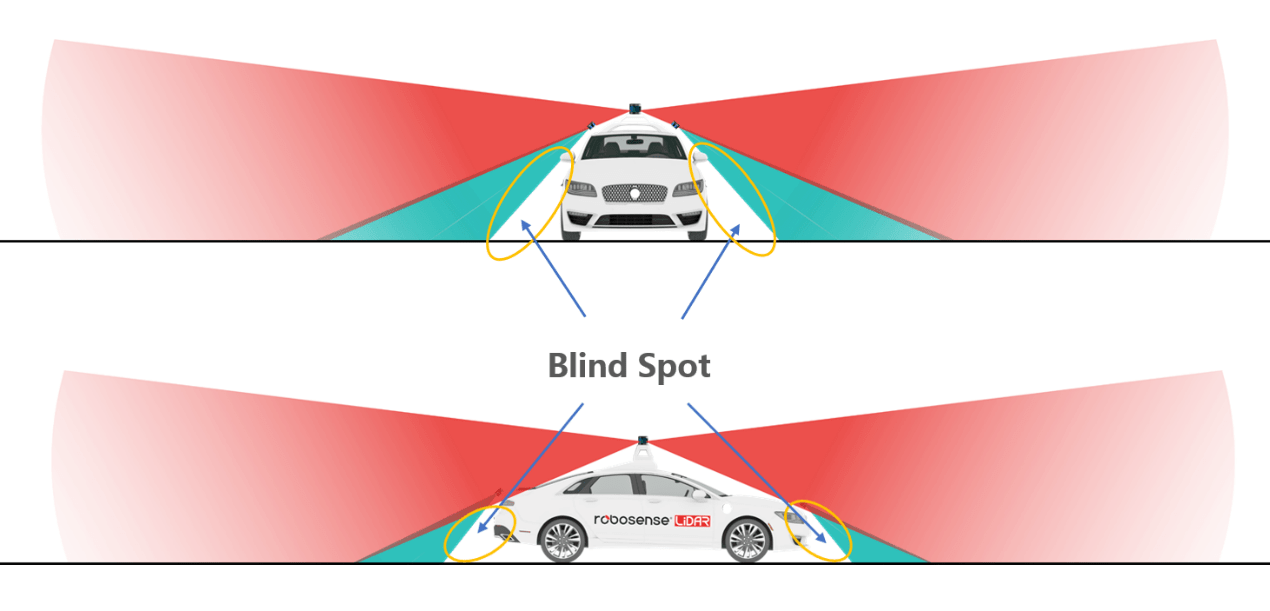
Kế hoạch A: LiDAR chuyên biệt để đạt được bảo hiểm điểm mù đầy đủ
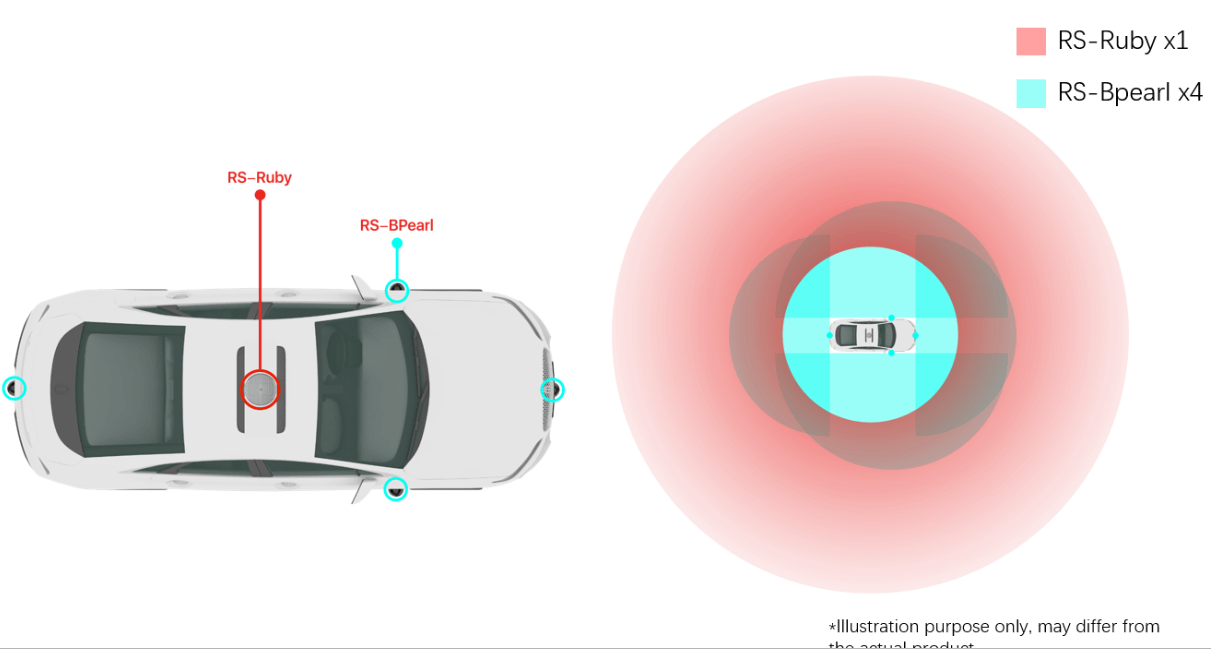
RS-Bpearl là một loại LiDAR tầm ngắn mới được thiết kế đặc biệt để phát hiện các điểm mù gần trường. Được trang bị công nghệ xử lý tín hiệu tiên tiến của RoboSense, RS-Bpearl có thể phát hiện các vật thể trong phạm vi vài cm, cũng như trường nhìn rất rộng khoảng 360 ° x 90 ° và RS-Bpearl có thể phát hiện hiệu quả các điểm mù xung quanh xe.

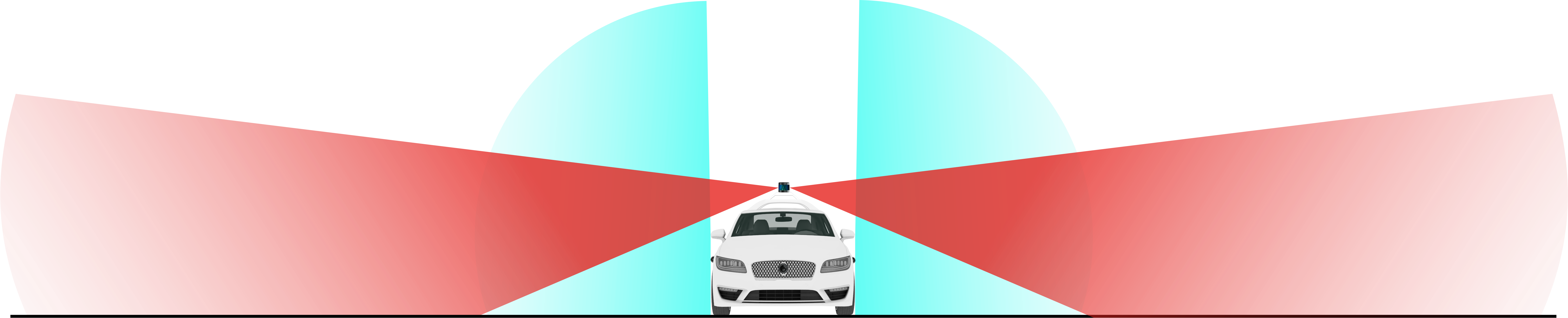

(Màu đỏ làm nổi bật khu vực có thể phát hiện của LiDAR chính và màu xanh lá cây biểu thị khu vực có thể phát hiện của RS-Bpearl. Khu vực điểm mù được che phủ hoàn toàn)
Khoảng 90 ° * 360 ° phạm vi bao phủ tầm nhìn cực rộng cho các vấn đề về điểm mù
RS-Bpearl có phạm vi bao phủ bán cầu rộng khoảng 90 ° * 360 °, có thể phát hiện thông tin độ cao thực tế trong một số trường hợp nhất định, chẳng hạn như cầu và kênh đào, cải thiện hơn nữa việc ra quyết định trong tự lái xe và an toàn lái xe.
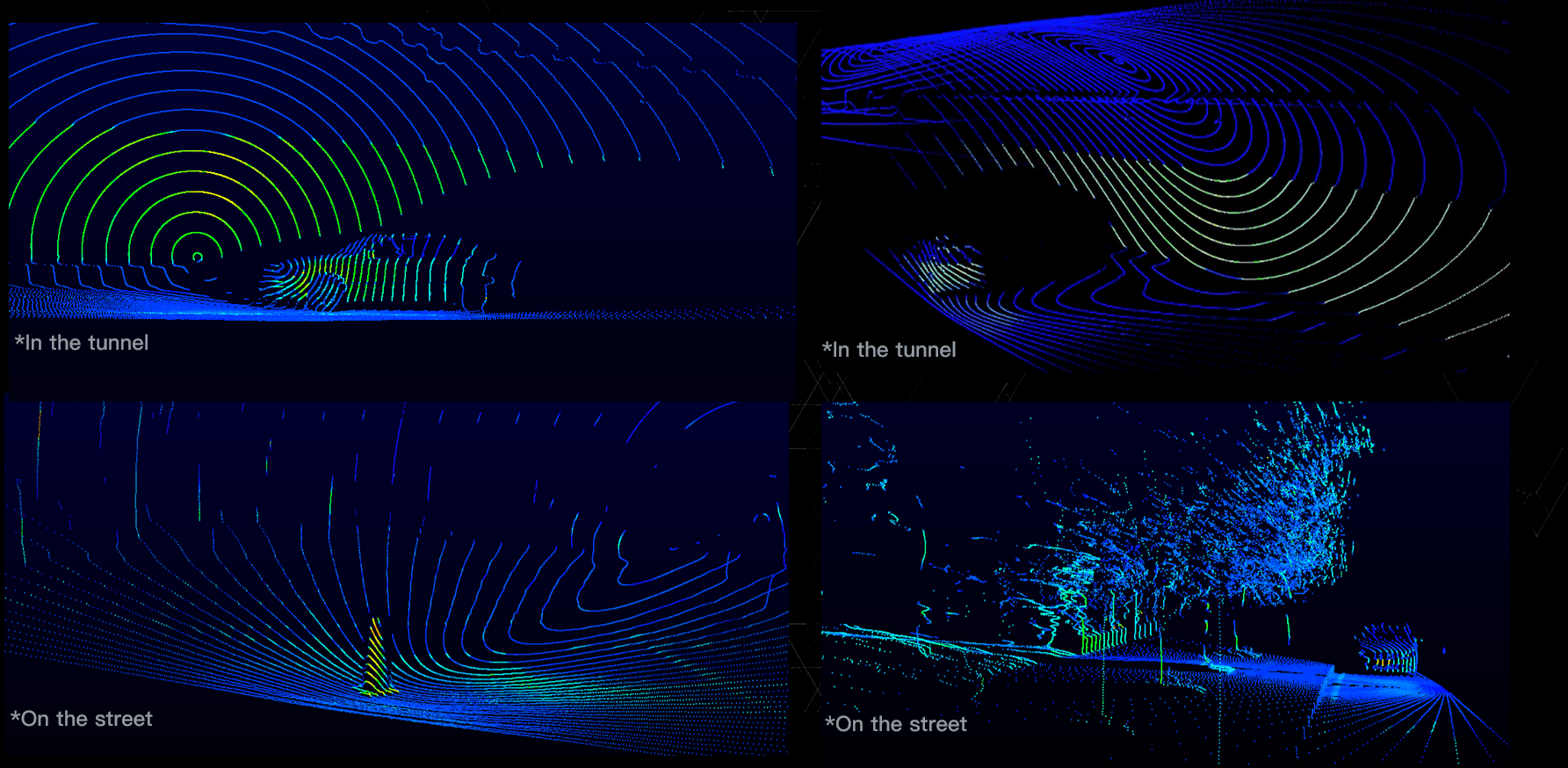
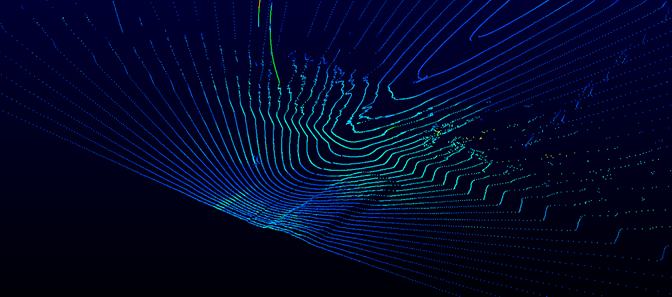
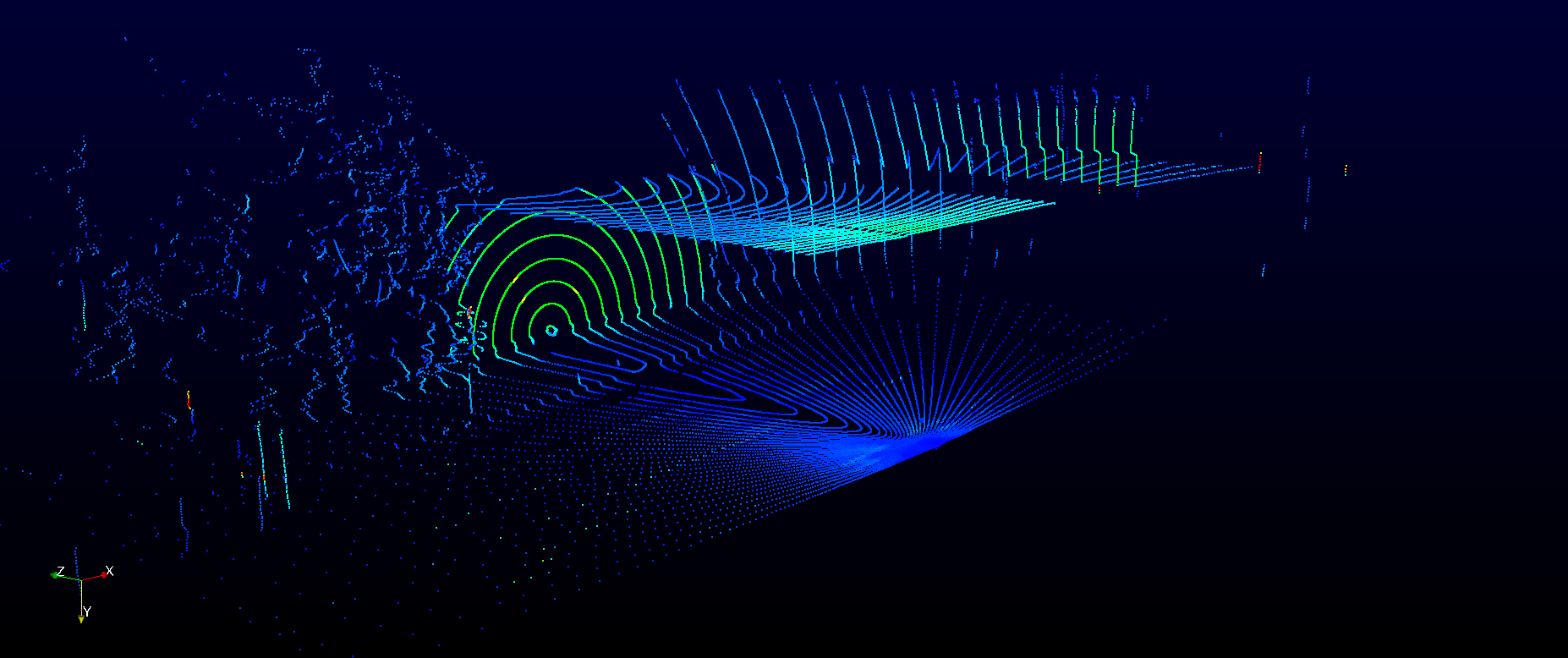
Hình ảnh đám mây RS-Bpearl trong nhiều tình huống
Điểm va chạm tốc độ hình ảnh đám mây
Hình ảnh đám mây xe RS-Bpearl qua cầu
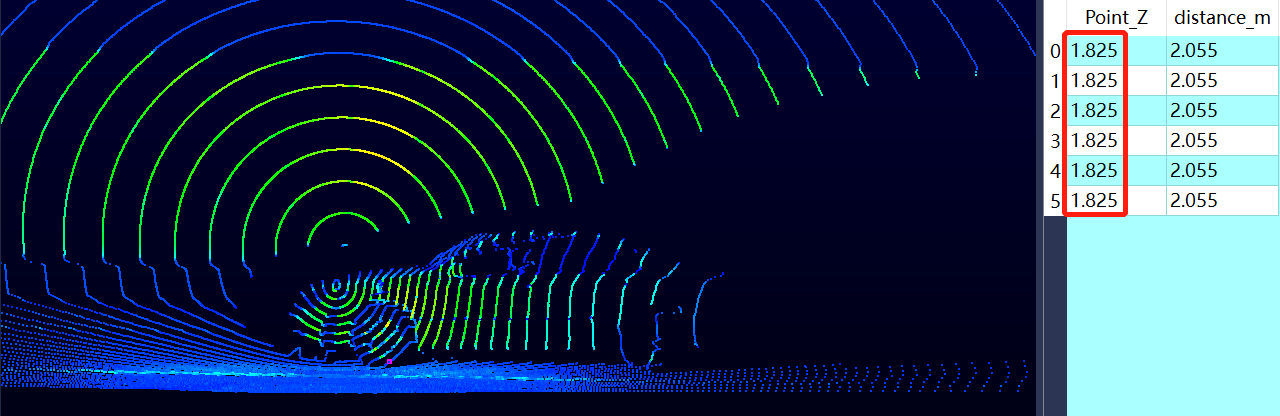
Hình ảnh đám mây RS-Bpearl cho xe hơi đi qua đường hầm
Phạm vi phát hiện tối thiểu nhỏ hơn 5 cm
Hiện tại, khoảng cách phát hiện tối thiểu đối với LiDAR thường có sẵn trên thị trường dao động từ 20 cm đến 50 cm, điều đó có nghĩa là khi lắp đặt trên xe độc lập, nó không thể đảm bảo phát hiện đầy đủ các vật cản gần thân xe.
RS-Bpearl với phạm vi phát hiện tối thiểu có thể nhỏ hơn 5 Ngộ độc, xác định chính xác các vật thể xung quanh thân xe và giúp phương tiện dễ dàng đối phó với các tình huống góc như phát hiện vật nuôi và trẻ em, điều hướng trong làn đường hẹp và lưu lượng giao thông lớn. Nó cũng có thể đạt được điểm mù toàn diện trong khu vực cảm biến để đảm bảo an toàn tự lái.
Hình ảnh đám mây RS-Bpearl cho các rào chắn
Hình ảnh đám mây RS-Bpearl của một chiếc xe hơi đi qua
Kích thước nhỏ, phù hợp với xe hơi.
Hình ảnh RoboSense RS-Bpearl (100mm * H111mm
Kích thước nhỏ gọn của RoboSense RS-Bpearl (100mm * 111mm) và cửa sổ quang bán cầu ở phía trên, đảm bảo rằng phần không quang của sản phẩm có thể được tích hợp hoàn toàn vào thân xe. Ngoài ra, thiết kế mô-đun sáng tạo của RS-Bpearl giúp giảm đáng kể chi phí trong khi làm cho sản phẩm linh hoạt hơn, nhỏ hơn và có thể tùy chỉnh.
Hiệu quả chi phí và hiệu suất cao
- Các dòng laser: 32
- Bước sóng laser: 905nm
- Điểm mỗi giây: 576.000 điểm / giây (chế độ quay lại đơn)
- Điểm mỗi giây: 1, 152.000 dpi / s (chế độ song công)
- Trọng lượng (không có dây cáp): ~ 0.92 kg
- Kích thước: φ100mm * H111mm
- Nhiệt độ hoạt động: -30 ° C ~ + 60 ° C
Khuyến nghị cài đặt
hiện hữu 4 Các lối vào bên RS-Bpearls được tích hợp xung quanh xe, mỗi lối vào cung cấp một khu vực quét bán cầu liên quan đến phối cảnh của xe, tổng RS-BPearls sẽ đảm bảo bốn tầm nhìn xung quanh 360 ° cộng với phạm vi bao phủ toàn bộ khu vực cảm biến với điểm mù bằng 0 trong khu vực lái xe.
Để biết thêm thông tin về RS-Pearl, vui lòng truy cập https://www.robosense.ai/rslidar/RS-Bpearl
Về RoboSense:
Được thành lập vào năm 2014, RoboSense (Suteng Innovation Technology Co., Ltd.) là nhà cung cấp hàng đầu của Hệ thống cảm biến LiDAR thông minh bao gồm cảm biến LiDAR, thuật toán trí tuệ nhân tạo và chip IC, biến đổi cảm biến LiDAR 3D truyền thống thành một hệ thống phân tích và hiểu dữ liệu hoàn chỉnh. Nhiệm vụ của công ty là có khả năng trí tuệ nhân tạo và phần cứng tuyệt vời để cung cấp các giải pháp thông minh cho phép robot (bao gồm cả phương tiện) có được khả năng nhận thức cao hơn con người.
Thu hút một đội ngũ các ngôi sao từ các công ty và tổ chức hàng đầu trên thế giới Có hơn 500 nhân viên tại 6 Các địa điểm toàn cầu – Thâm Quyến, Bắc Kinh, Thượng Hải, Tô Châu, Stuttgart và Thung lũng Silicon để hỗ trợ sự phát triển và phát triển nhanh chóng của RoboSense. Tính đến năm 2019, RoboSense có hơn 500 bằng sáng chế trên toàn thế giới.
Công ty định hướng thị trường cung cấp cho khách hàng một số giải pháp hệ thống trực quan thông minh LiDAR, bao gồm MEMS, CTD LiDAR cơ khí, Đơn vị Fusion Fusion và Hệ thống Fusion dựa trên AI.
RoboSense đã giành được Giải thưởng AutoSens, Nhà vô địch Phòng thí nghiệm Đổi mới của Audi và hai lần Giải thưởng Sáng tạo CES và đã đặt nền tảng vững chắc cho thành công của thị trường. Đến nay, các hệ thống LiDAR của RoboSense đã được áp dụng rộng rãi cho tính di động trong tương lai, bao gồm xe khách tự lái, RoboTaxi, RoboTruck, xe hậu cần tự động, xe buýt độc lập và đường thông minh của các công ty công nghệ tự lái trong nước và quốc tế, OEM và nhà cung cấp Tier1 .
.fb_iframe_widget_fluid_desktop iframe {display: 100%! Bài tập ; }}
Bài đăng có ba cách để phát hiện điểm mù trong một chiếc xe gần tự lái trước trong ValueWalk.
